
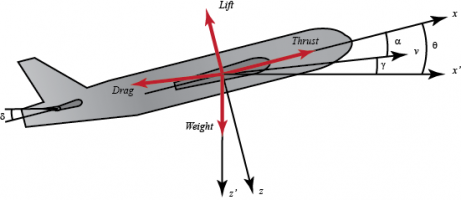
در پروژه کنترل اتوماتیک، کنترل زاویه گشتاور (Pitch) هواپیما انجام خواهد شد.
معادلات حاکم بر حرکت هواپیما، یک مجموعه پیجیده از ۶ معادله کوپل غیرخطی می باشد که تحت شرایط خاص می توان این معادلات را از هم دیکوپله کرد.
این پروژه شامل دوفاز می باشد:
فاز اول:
- تابع تبدیل حلقه باز برای ورودی پله و ضربه و سینوسی محاسبه و با استفاده از متلب (Matlab)، معادلات فضای حالت به تابع تبدیل، تبدیل می گردد.
- صفرها و قطب های سیستم حلقه باز محاسبه می شود.
- دیاگرام بلوکی از ورودی به خروجی رسم و توسط محیط سیمولینک متلب شبیه سازی شده است.
- برای حالت سیستم حلقه بسته بصورتی که خروجی مسئله (زاویه تتا) در سیستم کنترلی دخیل شده است، تابع تبدیل محاسبه و با متلب صحه گذاری شده است.
- بررسی پایداری سیستم با آرایه راث-هرویتز
- رسم مکان هندسی ریشه ها
فاز دوم:
- رسم نمودار بود (Bode) با متلب
- رسم نمودار نایکوئیست (Nyquist) با متلب
- طراحی کنترلر PD با دستور Sisotool
فایل پروژه کنترل اتوماتیک شامل:
- گزارش حل دستی محاسبات فاز اول پروژه بصورت عکس JPG
- گزارش فاز اول و دوم پروژه بصورت فایل ورد (Word)
- گزارش فاز اول و دوم پروژه بصورت فایل Pdf
- تمامی اشکال خروجی از نرم افزار متلب (Matlab)
- تمامی کدهای متلب و فایل های شبیه سازی در سیمولینک متلب